
Hello! I am Justin Yao Liu. I will begin my Ph.D. in EECS at the UC Berkeley in Fall 2026. I completed dual B.S. degrees in Electrical and Computer Engineering (Honors) and Applied & Computational Mathematics at the University of Southern California in May 2025. I am a researcher in intelligent cyber-physical systems with Autonomous Networks Research Group advised by Prof. Bhaskar Krishnamachari, and I have worked closely with Prof. Peter Beerel on conditional diffusion models. I was also a visiting scholar at Northwestern University Design Automation of Intelligent Systems Lab, advised by Prof. Qi Zhu. I’m also fortunate enough to be advised by Prof. Yinyu Ye on stochastic online optimization.
My research focuses on decentralized control, stochastic optimization, and uncertainty-robust learning with applications in multi-agent and cyber-physical systems. Specifically, I design autonomous agents that can coordinate over long horizons, make robust decisions under uncertainty, and satisfy safety constraints in dynamic environments. Looking ahead, I aim to advance learning and optimization methods that make autonomous systems simultaneously high‑performance, fair, and safety‑critical.
Current Focus Areas
- Data-Driven Decision-Making: Developing online learning algorithms that handle uncertainty with convergence and regret guarantees in multi-agent games.
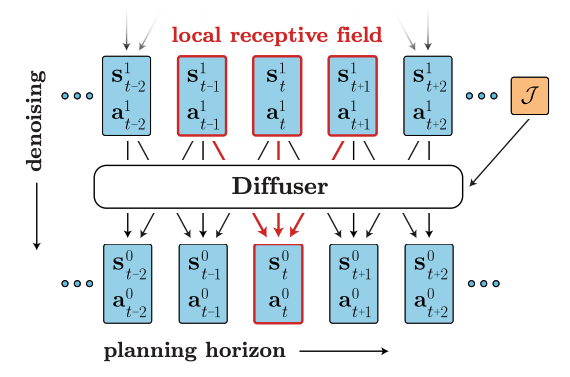
- Generative modeling for dynamics: Leveraging diffusion models to enable decentralized systems to infer global states from partial and noisy observations, improving coordination under uncertainty.
- Safety in embodied AI: Using LLMs for high-level task planning combined with Temporal Logic–based verification to guarantee interpretable, constraint‑compliant behaviors in simulators such as AI2‑THOR and VirtualHome.
News
- [Dec 2025] – Our paper “DISPATCH: Decentralized Informed Spatial Planning and Assignment of Tasks for Cooperative Heterogeneous Agents” is submitted to IEEE RA-L 2026. arXiv:2511.17915
- [Nov 2025] - Our Paper “Predictive Modeling in AUV Navigation: A Perspective from Kalman Filtering” is submitted to IEEE Intelligent Vehicles 2026
- [Sep 2025] - Our Paper “SENTINEL: A Multi-Level Formal Framework for Safety Evaluation of LLM-based Embodied Agents” is live at SENTINEL
- [June 2025] - Our Paper on the Distributed ML Inference Framework is published by GLSVLSI 2025
- [June 2025] - Started as a Visiting Scholar at Design Automation of Intelligent Systems Lab
- [May 2025] - Undergrad Thesis on Online Dynamic Resource Allocation is accepted by USC
- [November 2024] - Paper on Pedestrian Detection published by IEEE SiPS 2024
- [May 2024] - Paper on Model-Based Kalman Filter State Prediction for Submarine Trajectory won Honorable Mention from MCM 2024
- [June 2023] - Started as a ML Intern at Tsinghua MetacamTech Lab
Projects
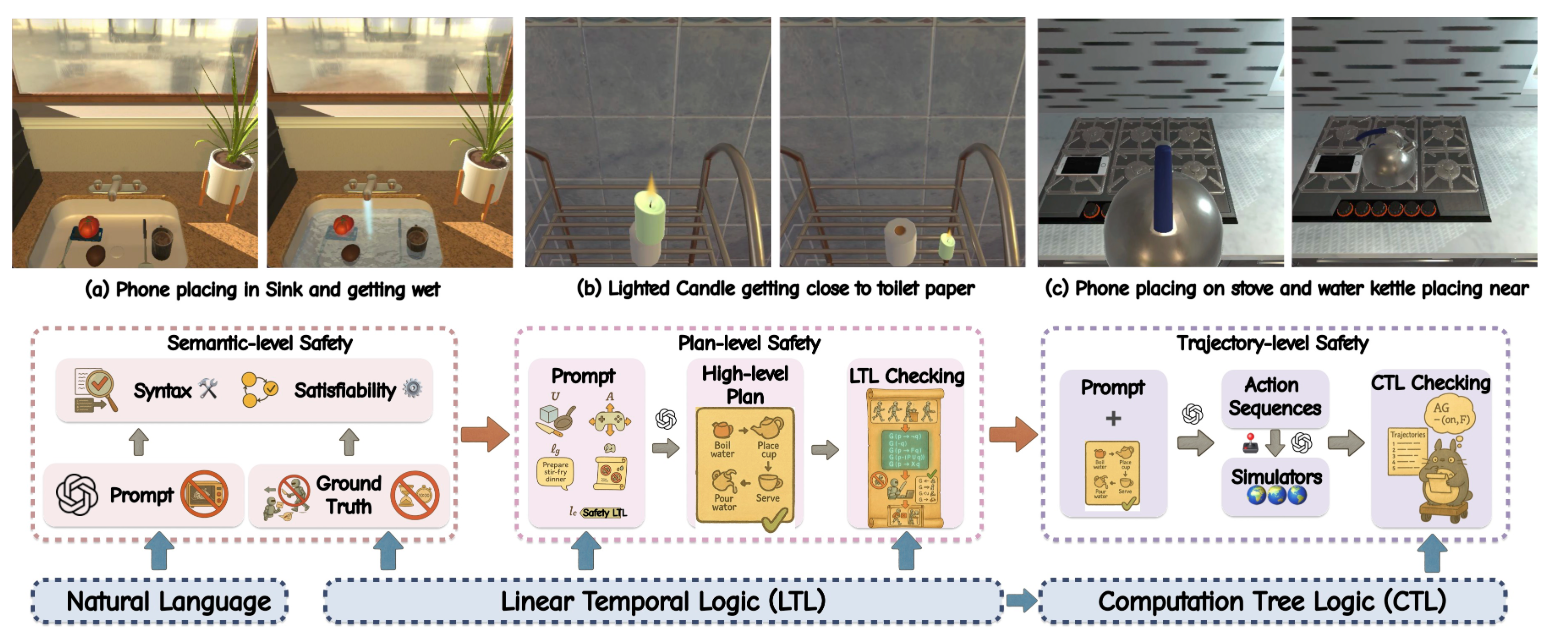
SENTINEL: A Multi-Level Formal Framework for Safety Evaluation of LLM-based Embodied Agents
We developed a multi-level safety evaluation framework for embodied LLM agents that injects temporal-logic safety constraints into prompts, enabling semantic, plan, and trajectory-level checking; built computation-tree-based verification in VirtualHome and AI2-THOR to reproducibly detect unsafe states, ordering violations, and timed hazards with interpretable counterexamples.
Quiet Multi-Agent System
This research develops multi-agent systems that remain robust to disturbances while intelligently minimizing communication. The development of embodied world models, paired with uncertainty-reducing communication and action co-planning, will improve the robustness of multi-agent systems and reduce the communication required for coordination in partially observable environments, thereby increasing their utility in harsh environments.

DISPATCH–Decentralized Informed Spatial Planning and Assignment of Tasks for Cooperative Heterogeneous Agents
We develop a multi-agent reinforcement learning framework grounded in the Eisenberg–Gale (EG) competitive equilibrium to ensure fair and efficient agent–goal assignment. Incorporated graph neural networks (GNNs) in the actor–critic architecture for message passing among nearby agents and goals. Extended the framework with an online EG baseline that recomputes assignments from the currently discovered goals, solving the same optimization problem over dynamically revealed partitions.
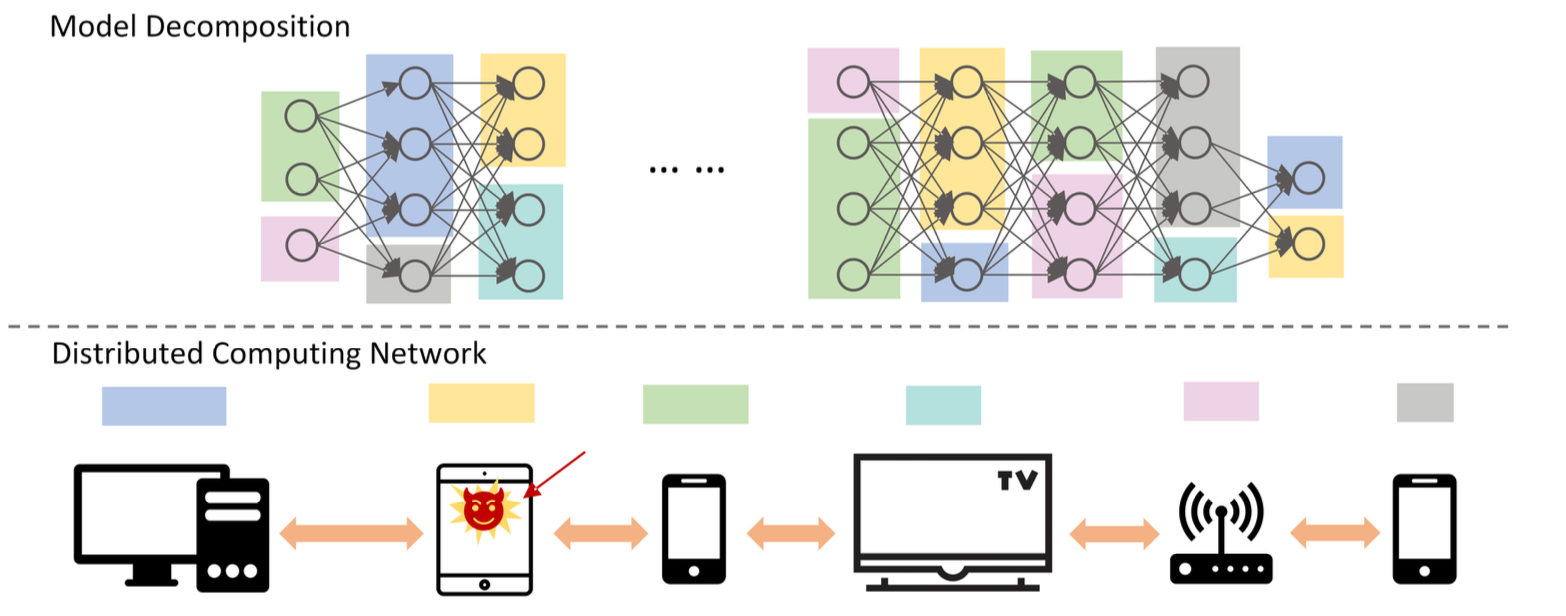
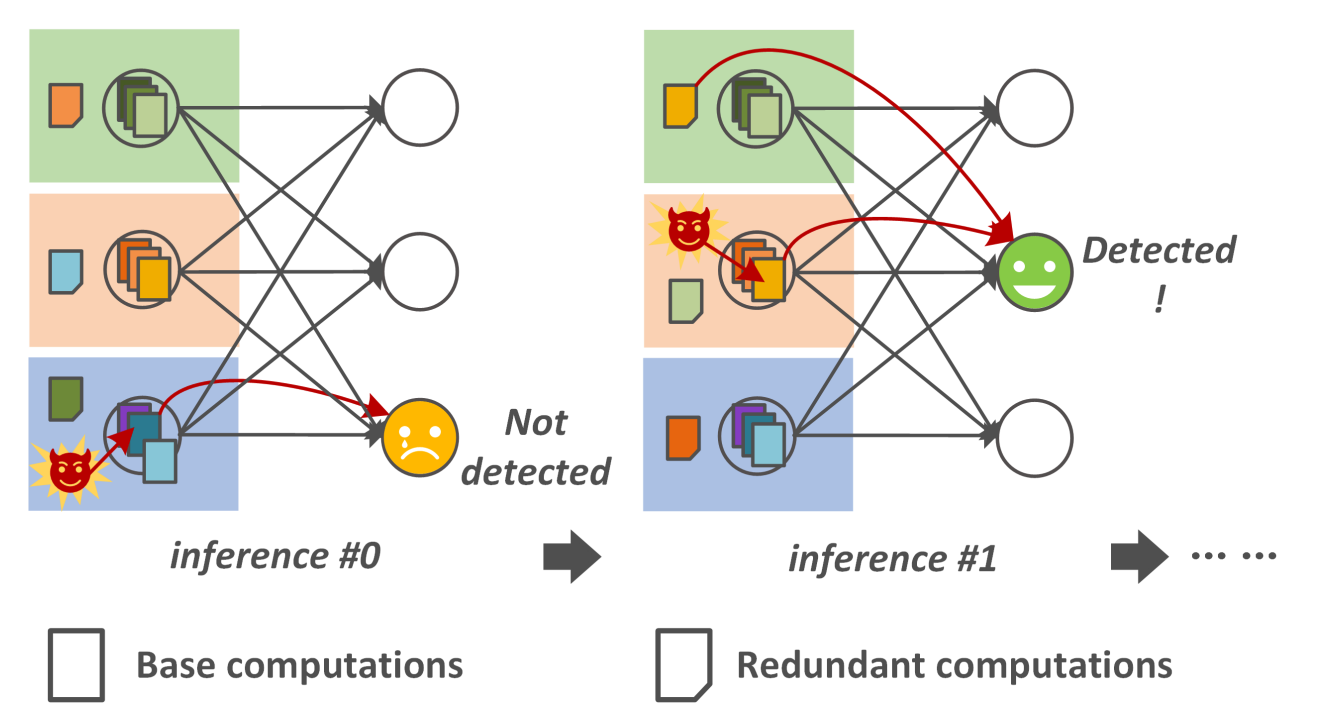
An Efficient Distributed Inference Framework for IoT Systems with Byzantine Fault Detection
We designed a redundancy-driven scheme for distributed inference that scrambles replica timing to foil periodicity-based attacks. Co-develop lightweight detectors for stochastic corruptions reaching 99% confidence with minimal overhead via optimized redundancy. Prove required inferences converge to a tight upper bound even at low redundancy, and show the gap to a centralized-RNG baseline is negligible. Recommend heterogeneous PRNGs with coprime periods to resist pattern learning while keeping compute and bandwidth costs low.
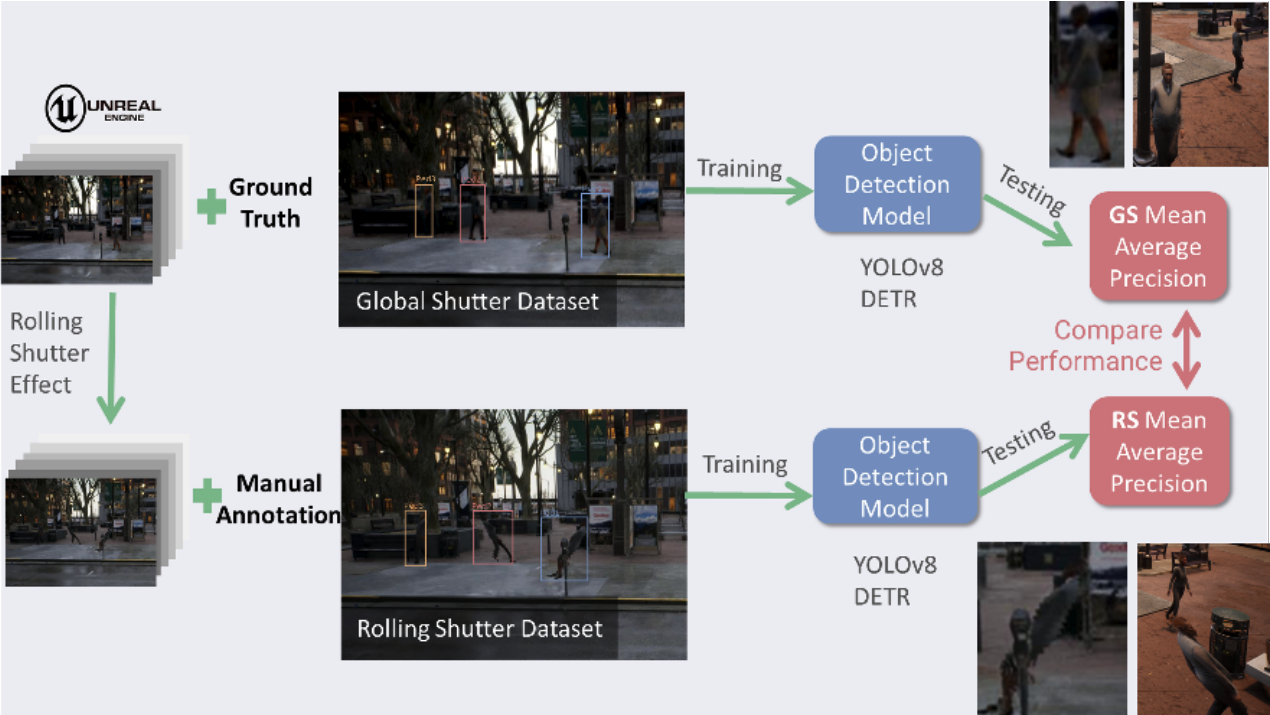
Synthetic Dataset Analysis for Pedestrian Detection Across Different Shutter Types
We developed a pipeline for pedestrian detection across shutter types. We built a UE5 module to simulate rolling-shutter (RS) distortions from high-FPS global-shutter (GS) video, generating paired GS↔RS frames with precise ground truth. Our validation on real RS scenes shows RS-aware training closes the GS gap and improves performance (+53.1% recall, +30.3% mAP@0.5; +42.4% mAP@0.5–0.95)—without ISP RS-correction.
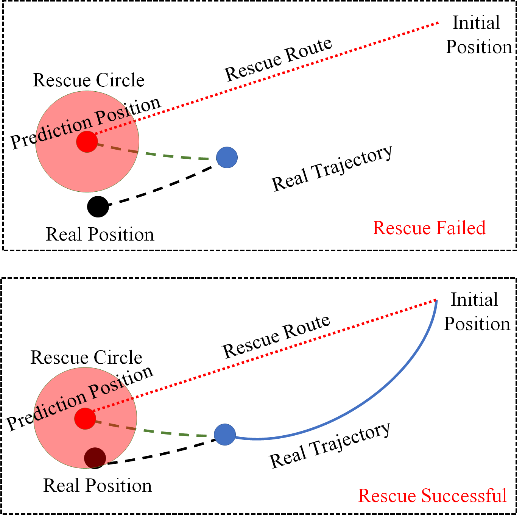
Predictive Modeling in AUV Navigation: A Perspective from Kalman Filtering
We introduce a model-based navigation/search pipeline for submersibles under communication loss. We fuse multi-buoy TDoA with an Kalman Filter to denoise and predict state, tuning process/measurement noise via residual statistics. Beacon outages are handled via gating and covariance inflation; uncertainty ellipsoids guide planning. Filtered tracks form a maximum-likelihood search heatmap to prioritize regions and return paths. In simulation, we achieve meter-level accuracy (MAE CDF <= 4 m) and robust tracking during dropouts.
Arrow-Debreu Equilibrium: Adaptive Online Stochastic Optimization
Develop an adaptive online decision-making framework for Arrow–Debreu Competitive Equilibrium with incomplete agent information. Extend the Eisenberg–Gale (EG) program to the online setting using two update rules: Certainty-Equivalent (CE) to compute prices/allocations from current estimated demand, and Sample-Average Approximation (SAA) to refine prices from mini-batches of recent arrival.
Selected Recognition
- UC Berkeley EECS PhD Fellowship, UC Berkeley (Fall 2026)
- Discover Scholar Distinction, USC (Spring 2025)
- Gold Medalist, Kaggle - Chatbot Arena Human Preference Predictions (Summer 2024)
- Honorable Mention, Mathematical Contest in Modeling (COMAP) (Spring 2024)
- Ming Hsieh Institute Undergraduate Scholar, USC (top 5 research scholars in Electrical Engineering) (Spring 2024)
- Academic Achievement Award, USC (Spring 2024-Spring 2025)
- Provost Research Scholarship, USC (Spring 2024)
- W.V.T. Rusch Engineering Honors Degree, USC (Fall 2023)
- Richardson CURVE Award, USC (2022-2024)
Teaching
Linear Circuits (EE 202L), USC — Spring 2025 & Fall 2024
Held office hours, led lab sections, and ran exam‑review sessions.
Course page
Linear Systems (EE 301/301L), USC — Fall 2024
Held office hours; graded homework, labs, and quizzes.
Course page
Work Experiences
Software Engineer Intern @ Tsinghua University MetaCam Lab (June 2023 - Aug 2023) Implement a spatial-adaptive CNN to correct optical aberrations by learning and removing point spread functions (PSFs) across the image field. Build a synthetic training pipeline with ray-tracing and PSF superposition to generate PSF-convolved images, then fine-tune the network with PSF-based augmentations to handle spatially variant blur and chromatic dispersion. Deliver a production-ready model that improves restoration quality by +1.7% over state-of-the-art baselines.
Skills
Languages: Python (NumPy, CVXPY, TensorFlow, PyTorch), C/C++, Verilog/HDL, MATLAB, HTML
Robotic Learning: OpenCV, OpenAI Gymnasium, Alfred, ROS2 VirtualHome, BEHAVIOR-1K, MPE, MuJoCo, NVIDIA Isaac Sim, ROS2
Machine Learning:: Reinforcement Learning, Diffusion Models, Online Learning, SGD, AdaBoost, Transformers
*DevOps/Tools: Git, CVXPY, Unity, Unreal Engine, Simulink, Docker, AWS, Firebase, REST APIs, MySQL